酷家乐携手英国帝国理工 推出全球室内感知数据集
深度学习与人工智能(AI)目前是计算机研究领域的热点,借助计算机深度学习的强大能力,视觉数据集目前在计算机图像学及视觉领域备受关注。9月3月,在英国纽卡斯尔大学召开的计算机视觉大会BMVC(BRITISHMACHINEVISIONCONFERENCE)上,酷家乐联手世界顶 级学府英国帝国理工学院计算机机器人视觉实验室及美国南加州大学,推出全球的SLAM(SimultaneousLocalizationandMapping,同步定位与地图构建)深度学习数据集。
酷家乐携手世界名校推出全球zui 大室内感知数据集
BMVC计算机视觉大会是计算机视觉和相关领域几大重要国际性会议之一,自1985年以来已成功举办28届。

这当中包括由酷家乐、英国帝国理工学院、美国南加州大学联合完成的论文《InteriorNet:Mega-scaleMulti-sensorPhoto-realisticIndoorScenesDataset》。与此同时,酷家乐与英国帝国理工学院、美国南加州大学联手推出InteriorNet数据集。这是目前世界上zui 大的公开室内场景认知数据集。
近年来,以GoogleImageNet、MicrosoftCOCO和IntelGTA5为代表的认知类数据集为场景认知、物体识别等深度学习相关的AI认知系统提供了巨大的驱动力。比如IntelGTA5就被应用到自动驾驶汽车项目,用来训练无人驾驶AI,以成为业界标杆。
酷家乐是行业领先的家居云设计平台,一直专注于将AI这样的新技术注入家居行业,不断研发AI技术,同时平台积累的大量逼近于真实场景的室内设计数据也将反哺人工智能技术的发展。因此,酷家乐联合学术界推出广泛用于室内场景认知的数据集,不仅推动行业升级,优化家居智能体验,同时也推动科技的前进。

通过光线追踪渲染引擎模拟产生的观察图像(对比真实世界观察数据)
InteriorNet数据集助力室内场景AI革命
InteriorNet深度学习数据集中包含了1600万组像素级标签数据,包含1.5万组视频数据,共计约1亿3千万图像数据。该数据集对无人机/智能机器人在室内场景的运动状态及观察数据进行模拟。
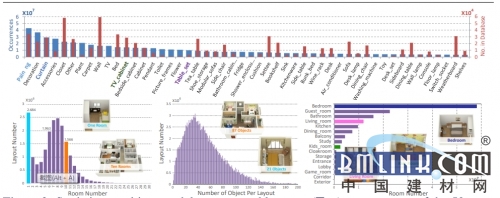
InteriorNet相关统计数据(约1亿3千万图像数据)
其中,英国帝国理工学院WenbinLi博士主持研发的Visim工具负责在指定场景中自动\手动生成无人机观察及行进轨迹;随后机器人观察到的图像数据则均通过酷家乐自主研发的AI光线追踪渲染引擎(KujialeFFAIRenderEngine)对无人机在设计师设计的室内场景中进行渲染产生。
通过深度学习和场景识别,系统可以自动快速的生成大量的样板间,从而不需要真实拍摄即可获得室内场景的大量数据集,形成接近于现实情况的数据集,用于室内场景的更多AI探索中。
1/2 记录数:2 首页 上一页 1 2 下一页 末页